 Tutorial kali ini akan memperlihatkan kepada anda 5 teknik sederhana, namun sangat penting, bagi pemula Photoshop jika ingin menekuni foto retouch (manipulasi foto digital). Anda akan temukan betapa mudah menambah kontras dan kedalaman warna pada gambar untuk membuatnya tampak lebih bagus. Tutorial ini benar-benar simpel, namun efektif. Selamat mencoba.
Tutorial kali ini akan memperlihatkan kepada anda 5 teknik sederhana, namun sangat penting, bagi pemula Photoshop jika ingin menekuni foto retouch (manipulasi foto digital). Anda akan temukan betapa mudah menambah kontras dan kedalaman warna pada gambar untuk membuatnya tampak lebih bagus. Tutorial ini benar-benar simpel, namun efektif. Selamat mencoba.Kita ambil sembarang foto dan menerapkan 5 teknik untuk memperbaiki efek keseluruhan foto. Berikut ringkasan 5 topik yang akan dibicarakan dalam tutorial ini:
1. menghilangkan noda hitam dengan Spot Healing Brush
2. membuat mata terlihat lebih jelas
3. memanfaatkan surface blur untuk menghaluskan kulit, bukan menggunakan gaussian blur
4. membuat bibir terlihat lebih indah
5. menambah kedalaman warna dan kontras pencahayaan pada rambut
Ini adalah tampilan sebelum dan sesudah hasil akhir:
Sebelum Sesudah


Baiklah, mari kita mulai belajar manipulasi foto dengan Photoshop.
Dalam tutorial ini, akan digunakan foto berjudul Self 16. by ~The1stGrape-stock
Menghilangkan Noda Hitam dengan Spot Healing Brush
Pertama kali mengamati foto yang kita jadikan obyek, kita dapat melihat beberapa titik hitam pada kulitnya, seperti ditunjukkan di bawah ini:


Untuk memperbaikinya, kita dapat menggunakan tool Spot Healing Brush, seperti terlihat dalam toolbox berikut:

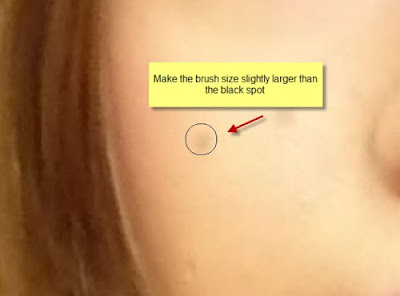
Seret Spot Healing Brush, atur ukuran brush agar sedikit lebih besar dari noda hitam, dan lakukan klik pada noda tersebut:
Dapat anda lihat, setelah anda melakukan klik, noda hitam menghilang:

Dasarnya, apa yang terjadi adalah bahwa dengan tool Spot Healing Brush, ia mengambil contoh dari piksel warna sekitar kulit dan menggunakannya untuk mengganti piksel warna noda hitam. Magic, bukan?
Lakukan cara yang sama untuk menghilangkan semua noda hitam di seluruh wajahnya, berikut efeknya sejauh ini:

Membuat Mata Terlihat Lebih Jelas
Sekarang, perhatikan matanya, yang sudah cukup indah meskipun tanpa perbaikan, namun kita dapat lebih memperindahnya lagi, inilah caranya:
Duplikasi layer background sekali, atur blending mode pada "Soft Light" untuk layer hasil duplikasi, anda akan mendapatkan efek:

Dapat anda lihat dengan melakukan hal tersebut sejatinya kita menambah gelap keseluruhan gambar. namun disini kita hanya ingin menambah kedalaman mata, jadi kita perlu menghilangkan gambar sisanya pada layer kopi tersebut. untuk melakukan hal ini, klik layer > layer mask > hide all, kemudian pada layer mask, gunakan Brush putih untuk menggambar dalam mata, seperti terlihat pada ilustrasi berikut:

Dengan melakukan hal tersebut kita hanya menampilkan porsi mata pada layer saja. Ini adalah hasil setelah proses melukis itu:

Memanfaatkan Surface Blur untuk Menghaluskan Kulit
Sekarang mari kita buat kulitnya sedikit lebih lembut. untuk melakukannya, kita gunakan Surface Blur. Alasan pemilihan Surface Blur ini adalah karena, tidak seperti Gaussian Blur (yang mengaburkan keseluruhan image), Surface Blur menyisakan detail garis. Ini mengeliminir kebutuhan untuk menambahkan layer mask pada layer duplikasi untuk memunculkan garis (edge).
Jadi, gandakan layer background original sekali saja, dan terapkan setting Surface Blur seperti berikut:

Atur opacity dari layer duplikat pada 70%, dan anda akan mendapatkan efek sebagai berikut:

Mempermak bibir agar terlihat lebih menawan
Untuk melakukannya, gunakan Lasso Tool untuk membuat seleksi sekitar bibir sebagaimana tampak dalam ilustrasi berikut:

Tekan Ctrl + J dua kali untuk membuat dua duplikat dari seleksi, ubah blending mode dari duplikat pertama menjadi Multiply, dengan opacity 100%. Ubah blending mode layer duplikat yang kedua menjadi Linear Light, dengan opacity 55%.
Gunakan penghapus (eraser) yang lembut dan bundar untuk menghapus tepian bibir secara hati-hati, sehingga akan diperoleh hasil sebagai berikut:

Tambahkan layer lain di atas semua layer, pakai kuas (brush) bulat lembut warna putih untuk melukis secara hati-hati sekitar bagian bawah bibir untuk menambah pencahayaan ekstra:

Tips: atur flow dan opacity pada brush di kisaran angka 40%, ini cara kita agar dapat menerapkan efek brush secara bertahap.
Menambah Kedalaman Warna dan Kontras Pencahayaan pada Rmbut
Terakhir, kita dapat menambah beberapa kedalaman warna gadis dalam foto. Untuk melakukannya, kita dapat menambahkan layer Curves Adjustment dengan pengaturan sebagai berikut:

Tambahkan layer mask berikut pada layer Curves adjustment:

Inilah efek hasil akhirnya:

 (Ziddu)
(Ziddu)






